Projects
Here is a selection of my main projects. More details are available on my GitHub pages.
Video-based Obstacle Avoidance using Deep Reinforcement Learning (DRL)
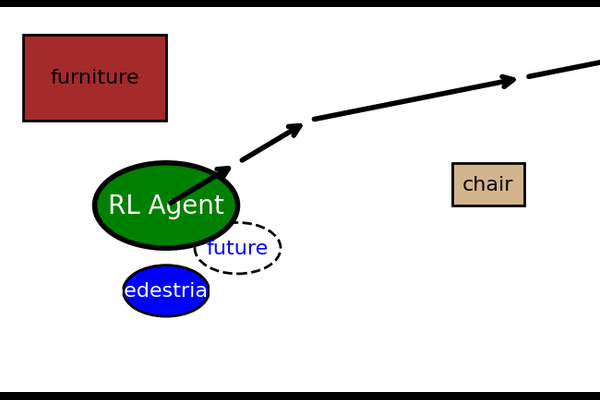
An end-to-end obstacle avoidance system for autonomous mobile robots using real-time video.
A YOLO-based detector provides perception, while DQN/PPO learn collision-free navigation policies in ROS + Gazebo.
Kalman Filter for Motion Tracking
![]()
Implements a 2D Kalman Filter to smooth noisy position measurements and estimate velocity.
Improves trajectory stability and tracking accuracy for mobile robots and navigation tasks.
Bayesian Regression for Noisy Sensor Data
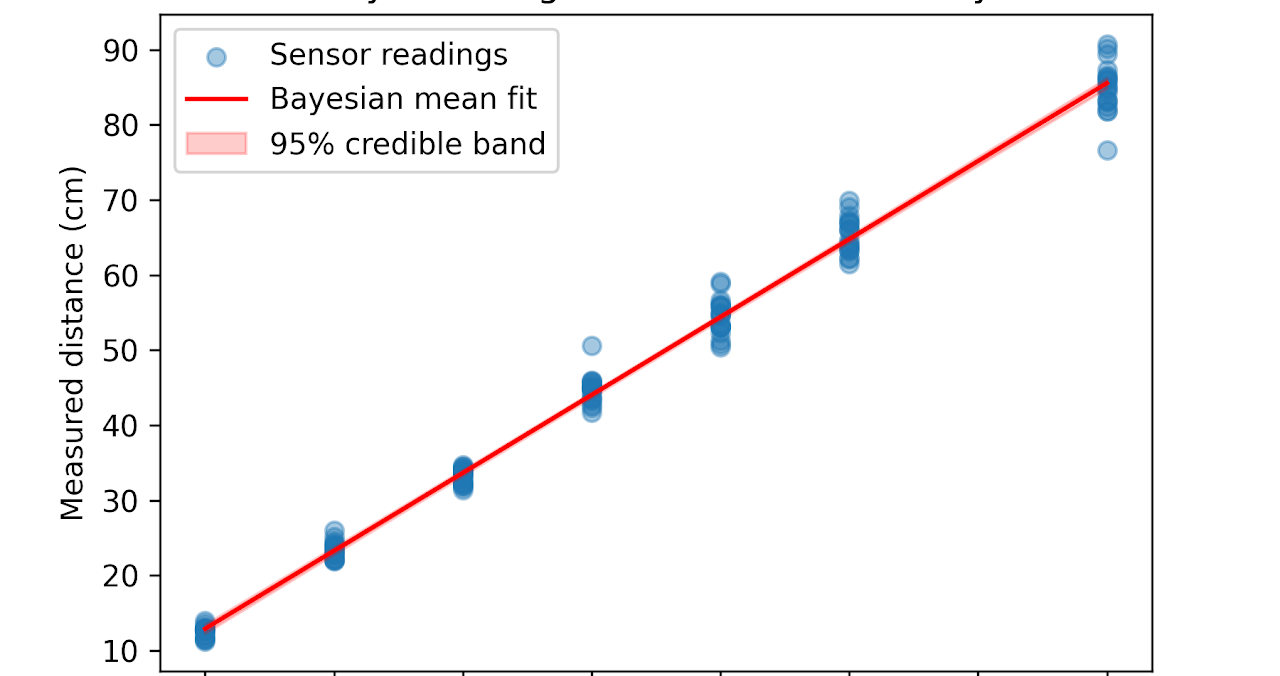
A Bayesian linear regression framework for modeling sensor readings with uncertainty.
Produces predictive distributions with credible intervals to make sensor-based decisions more reliable.
Classifying Fashion-MNIST Images with CNNs
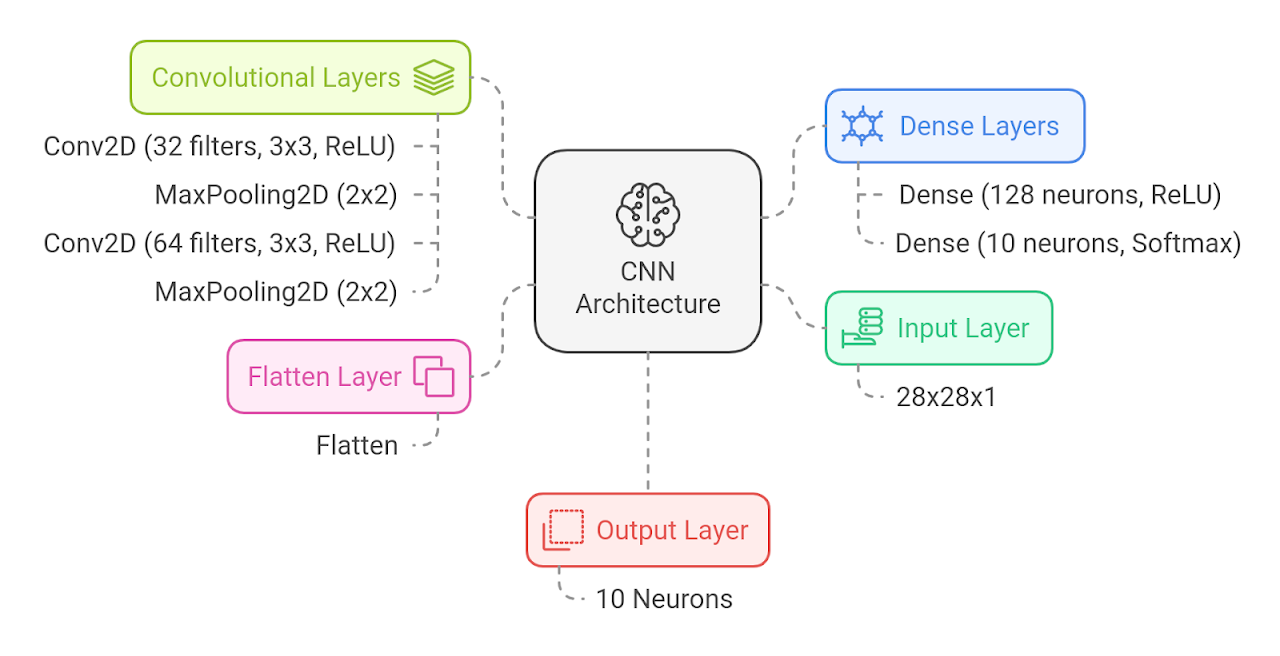
Custom CNN trained on the Fashion-MNIST dataset for clothing classification.
Achieves around 90.66% test accuracy, strengthening practical skills in deep learning and model evaluation.
Attention-Enhanced Spatio-Temporal GCN for Air Quality Prediction
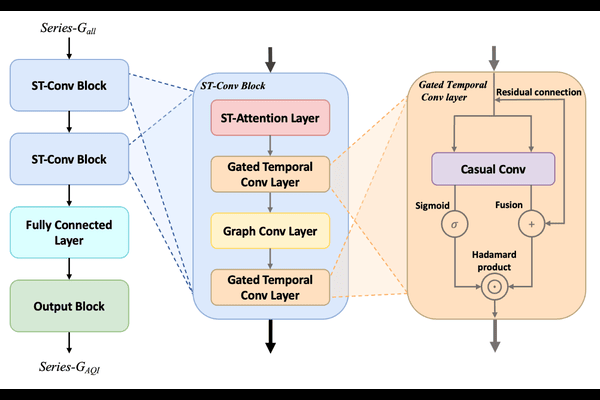
Proposes an Attention-Enhanced Spatio-Temporal GCN (AE-STGCN) for air-quality forecasting.
Fuses pollutant, meteorological and POI data, using attention to focus on the most relevant regions and time steps.
Multi-point Navigation for Intelligent Inspection Robots
Efficient navigation strategy for inspection robots visiting multiple waypoints under constraints.
Related to my journal paper in Journal of Computing & Electronic Information Management (2024) on multi-point navigation.